Error Types
Before we can define methods for our RTC traits, we need to figure out how to handle errors. We'll use the same approach as embedded-hal.
Evolution of Error Handling in embedded-hal
Before version 1.0, embedded-hal used an associated Error type in each trait. This was simple but caused problems; drivers couldn't easily work with errors in a generic way since each HAL had its own error enum.
In version 1.0, embedded-hal introduced a new model. HALs can still define their own error enums, but those error types must implement a common Error trait that exposes a standardized ErrorKind. This allows applications and generic drivers to inspect errors in a portable way, independent of the underlying implementation.
Example Problematic Code
Looking at this example code, you can see the problem with just using associated types. Driver1 and Driver2 each define their own error enums.
In application code that works with any RTC driver, you can only print the error or check if one occurred. But you can't inspect what specific error happened.
If you want to take different actions based on the error type - like retrying on InvalidAddress or logging InvalidDateTime; this approach won't work. The error is just T::Error and you have no way to match on the actual error variants across different drivers.
pub trait Error: core::fmt::Debug {} pub trait Rtc { type Error: Error; fn get(&self) -> Result<(), Self::Error>; } mod driver1 { pub struct Driver1 {} #[derive(Debug, Eq, PartialEq, Copy, Clone)] pub enum Error { InvalidAddress, InvalidDateTime, } impl super::Error for Error {} impl super::Rtc for Driver1 { type Error = Error; fn get(&self) -> Result<(), Self::Error> { Ok(()) } } } mod driver2 { pub struct Driver2 {} #[derive(Debug, Eq, PartialEq, Copy, Clone)] pub enum Error { InvalidAddress, InvalidDateTime, } impl super::Error for Error {} impl super::Rtc for Driver2 { type Error = Error; fn get(&self) -> Result<(), Self::Error> { Ok(()) } } } // User Application code that uses any driver fn fun<T: Rtc>(r: T) { match r.get() { Err(e) => { // Problem: we can't inspect what kind of error this is! // `e` is just `T::Error` - could be driver1::Error or driver2::Error // No way to match on specific error types like InvalidAddress, InvalidDateTime, etc. // Each driver has different error enums with no common interface println!("Error: {:?}", e); } _ => {} } } pub fn main() { let d1 = driver1::Driver1 {}; let d2 = driver2::Driver2 {}; fun(d1); fun(d2); }
Our RTC Error Design
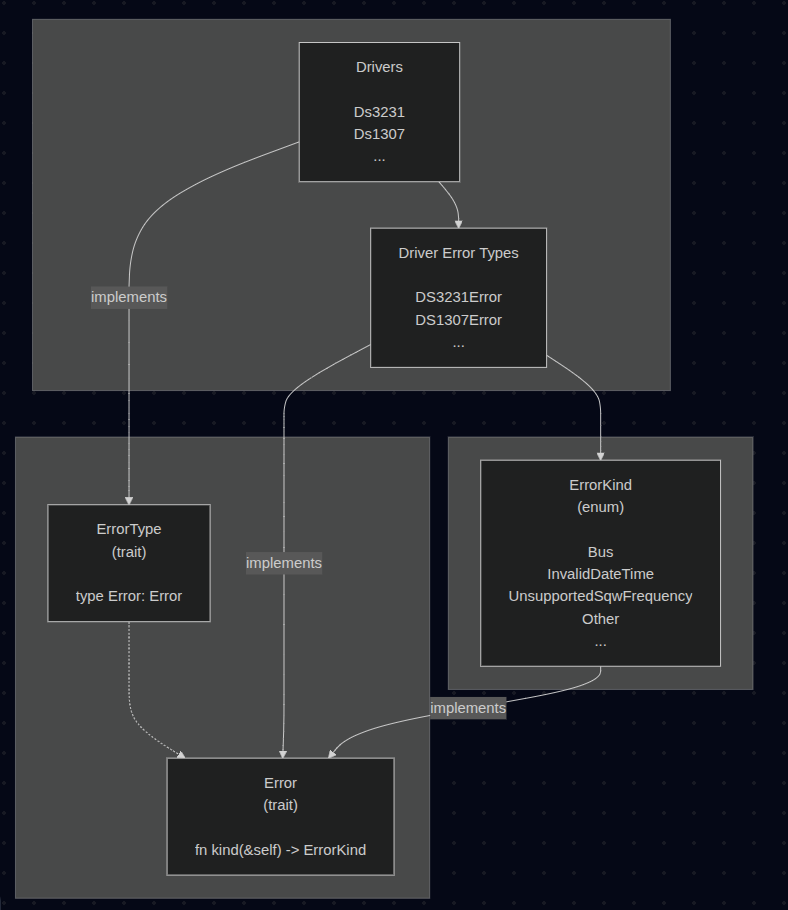
We'll use the same pattern as embedded-hal 1.0 and Rust's std::io::Error. We will define standard error kinds so RTC drivers like ds3231 and ds1307 can use errors that fit their hardware while applications can handle errors the same way across different drivers.
Here is the overall Architecture of the RTC HAL error handling:
Implementation Example
Here's how the error handling architecture will look in practice:
RTC HAL side:
We define common error kinds and traits that all RTC drivers must implement
#![allow(unused)] fn main() { pub enum ErrorKind{ ... } pub trait Error { fn kind(&self) -> ErrorKind; } pub trait ErrorType { /// Error type type Error: Error; } ... }
Driver side:
Each driver defines its own specific errors but maps them to standard error kinds
#![allow(unused)] fn main() { pub enum Error{ ... } impl rtc_hal::error::Error for Error { // Map driver-specific errors to standard RTC HAL error kinds fn kind(&self) -> rtc_hal::error::ErrorKind { match self { Error::InvalidAddress => rtc_hal::error::ErrorKind::InvalidAddress, Error::InvalidDateTime => rtc_hal::error::ErrorKind::InvalidDateTime, ... } } } impl rtc_hal::error::ErrorType for DriverStruct { type Error = crate::error::Error; } }
Application side:
Applications can handle errors uniformly across different RTC drivers by matching on ErrorKind
#![allow(unused)] fn main() { pub struct DemoApp<RTC> { rtc: RTC, } impl<RTC: Rtc> DemoApp<RTC> { pub fn set_datetime(&mut self, dt: &DateTime) { if let Err(e) = self.rtc.set_datetime(dt) { // Handle errors generically using standard error kinds match e.kind() { rtc_hal::error::ErrorKind::InvalidDateTime => { error!("Invalid datetime provided"); } rtc_hal::error::ErrorKind::Bus => { error!("RTC communication failed"); } _ => error!("handle other errors..."), } } } ... } }
This is the only complex part of the rtc-hal ; the rest is fairly simple (at least that's what i think). Take your time to go through it and understand the structure.